
시네마 4D(Cinema 4D)/기본 애니메이션
다이내믹 애니메이션 기초
danmujicat
2025. 5. 7. 13:32
✅ Dynamics Body 설정하기
- Cube 및 Plane 오브젝트 생성
- 상단 커맨드 팔레트에서 [Cube], [Cube] → [Plane]을 클릭하여 생성합니다.
- [Cube ] Size.X :100cm, Size.Y:100 cm, , Size.Z :100 cm

- Cube에 Rigid Body 태그 추가
- Cube 선택 → 오브젝트 매니저 상단 메뉴 [Tags] → [Bullet Tags] → [Rigid Body] 클릭
- Cube 선택 → 오브젝트 매니저 상단 메뉴 [Tags] → [Bullet Tags] → [Rigid Body] 클릭
- Plane에 Collider Body 태그 추가
- Plane 선택 → [Tags] → [Bullet Tags] → [Collider Body] 클릭
- Plane 선택 → [Tags] → [Bullet Tags] → [Collider Body] 클릭
- F8 키를 눌러 두 오브젝트가 중력 영향을 받아 시뮬레이션되는지 실시간 프리뷰 확인

✅ Connector 오브젝트 설정하기
- 오브젝트 만들기
- Cube 메뉴에서 Cube를 선택하여 Cube 오브젝트를 만듭니다.
- Size .X: 100 cm, Size Y : 5cm, Size.Z : 100cm, Segements X :1 , Segements Y :1, Segements Z :1
- Cube를 4개 복제하여 나란히 배치합니다.
- Connector 오브젝트 생성
- 메뉴 [Simulate] → [Bullet] → [Connector] 클릭
- 메뉴 [Simulate] → [Bullet] → [Connector] 클릭
- Connector 위치 이동
- 생성된 Connector를 Cube 0과 Cube 1 사이로 이동
- X축 방향으로 드래그하여 적절한 위치에 배치
- Connector 오브젝트 설정
- [Object] 탭
- Type: Hinge
- Object A: Cube 0
- Object B: Cube 1
- [Object] 탭
- Connector 추가 및 설정 반복
- [Simulate] → [Bullet] → [Connector] 선택하여 Connector.1, Connector.2, Connector.3 생성
- 각각 Cube 1↔Cube 2, Cube 2↔Cube 3, Cube 3↔Cube 4로 연결
- 양 끝 고정 커넥터 생성
- Start: [Simulate] → [Bullet] → [Connector] 생성, 이름 Start 변경 → Object B에 Cube 0 연결

- End: 위와 동일하게 [Simulate] → [Bullet] → [Connector] 생성, 이름 End 변경 , Object A에 Cube 4 연결


- Start: [Simulate] → [Bullet] → [Connector] 생성, 이름 Start 변경 → Object B에 Cube 0 연결
- 모든 Cube 오브젝트에 Rigid Body 태그 적용
- Cube 0~4 선택 → [Tags] → [Bullet Tags] → [Rigid Body] 클릭

- Cube 0~4 선택 → [Tags] → [Bullet Tags] → [Rigid Body] 클릭
- F8 키로 시뮬레이션 실행 → 양끝 고정된 징검다리가 연결되어 움직이는지 확인
- 추가 다이내믹 오브젝트 생성
- [Cube] → [Sphere] 클릭하여 생성한 후 Sphere 크기 조절 : [Object] 탭 → Radius: 50cm
- Y축 방향으로 이동하여 위치 조정
- Sphere에 Rigid Body 태그 적용
- Sphere 선택 → [Tags] → [Bullet Tags] → [Rigid Body] 클릭
11. F8 키로 시뮬레이션 실행 → Sphere가 징검다리와 충돌하며 반응하는지 확인

✅ Spring 오브젝트 설정하기
- 오브젝트 만들기
- Cube 메뉴에서 Cube를 선택하여 Cube 오브젝트를 만듭니다.
- Size .X: 200 cm, Size Y : 200cm, Size.Z : 200cm, Segements X :1 , Segements Y :1, Segements Z :1
- Cube 메뉴에서 Sphere를 선택하여 Sphere 오브젝트를 만듭니다.
- Radius : 100cm, Segements : 24 ,P.Y : -600cm
- Spring 오브젝트 생성
- 상단 메뉴 바에서 Simulate > Bullet > Spring을 클릭하여 Spring 오브젝트를 생성
- 오브젝트 연결
- 생성한 Spring 오브젝트를 선택한 후, Attributes 매니저 > Object 탭으로 이동
- [Object] 탭
- Object A: Sphere
- Object B: Cube

4. Dynamics 태그 지정
- 두 오브젝트가 물리적으로 상호작용하도록 Dynamics 태그를 추가.
- Sphere 오브젝트:
- 선택 후 Tags > Bullet Tags > Rigid Body를 적용.
- Cube 오브젝트:
- 선택 후 Tags > Bullet Tags > Collider Body를 적용.
- Sphere 오브젝트:

5. 스프링 길이 설정
- Spring 오브젝트를 다시 선택하고 Object 탭으로 이동합니다.
- 두 오브젝트 간의 초기 거리를 반영해 다음과 같이 설정합니다:
- Rest Length: 300cm
- 필요 시 Set Reset Length 버튼을 클릭하여 자동 계산도 가능합니다.
6. 애니메이션 확인
- 키보드의 F8 키를 눌러 애니메이션을 실행하고, Spring 오브젝트가 작동하는지 확인합니다.

✅ Force 오브젝트 설정하기
- 오브젝트 만들기
[그릇만들기]
- Cylinder 생성 : Radius: 200cm, Height: 80cm, Height Segments: 1, Rotation Segments: 16
- 편집 가능 상태로 전환 : Cylinder를 선택하고 Make Editable (C 키) 클릭
- 상단면 선 또는 면 선택 모드에서 전체 선택한 후 Scale 툴로 120% 확대
- 상단 면 선택한 후 inset 메뉴 선택 offset : 15cm, Subdivision: 3
- 상단 면 선택한 후 Extrude 메뉴 선택 offset : -70cm, Scale툴로 해당면을 80% 축소

- Subdivision Surface를 추가하고 Cylinder를 Subdivision Surface 하위에 설정

[공만들기]
- Sphere 생성 : Radius : 20cm, Segments : 16
- Cloner을 추가하고 Sphere를 Cloner 하위에 설정
- Cloner 속성에서 Count: 4,1,4 , Size : 64cm, 200cm, 64cm

[다이나믹 태그 적용]
- 복제된 공 오브젝트에 Rigid Body 태그를 적용하여 중력 및 충돌 반응 설정
- 그릇 오브젝트에 Collider Body 태그가 적용하여 공과 충돌 시 반응하도록 설정

- Force 오브젝트 추가하기
- 메뉴 바에서 [Simulate] → [Bullet] → [Force]를 클릭하여 Force 오브젝트를 추가

- 메뉴 바에서 [Simulate] → [Bullet] → [Force]를 클릭하여 Force 오브젝트를 추가
- Force 설정 (끌어당기기)
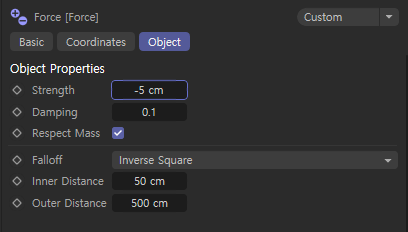
- Force 오브젝트를 선택한 뒤 [Object] 탭에서 [Strength] 값을 5cm로 설정

- Force는 원점을 기준으로 오브젝트를 끌어당기거나 밀어내는 방식으로 작동합니다.
- 키보드의 F8 키를 눌러 애니메이션을 재생하면 공이 Force 오브젝트 방향으로 끌려가는 모습을 확인할 수 있습니다.

- Force 오브젝트를 선택한 뒤 [Object] 탭에서 [Strength] 값을 5cm로 설정
Force 설정 (밀어내기)
- 같은 [Strength] 항목에 음수 값을 입력하면 오브젝트가 밀려나게 됩니다.
- 예를 들어, -5cm로 설정하고 F8 키로 애니메이션을 재생하면 공이 Force 오브젝트로부터 밀려나는 애니메이션이 표현됩니다.
- [Object] > Strength: -5cm

✅ Motor 오브젝트 설정하기 (풍력 발전기 예제)
1. 예제 파일 불러오기
- 파일명: 풍력 발전기의 몸체(Body) 와 날개(Wing) 가 분리된 상태로 모델링된 그룹 포함
바람개비.zip
0.13MB

2. Connector 오브젝트 추가 및 배치
- 메뉴: Simulate > Bullet > Connector
- 생성된 Connector 오브젝트를 선택하고 F3 키 (Right 뷰) 를 눌러 날개와 몸체 사이에 위치하도록 이동 및 배치

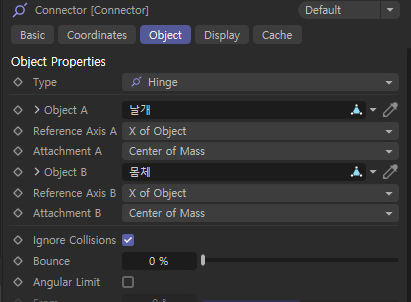
3. Connector 오브젝트 설정
- 탭: [Object]
- 설정:
- Object A : Wing
- Object B : Body
※ 연결 순서는 중요하지 않음
4. Dynamics 태그 설정
- 날개(Wing) 오브젝트
- 메뉴: Tags > BulletTags > Rigid Body
- 몸체(Body) 오브젝트
- 메뉴: Tags > Simulation Tags > Collider Body

5. Rigid Body 설정 (Wing 오브젝트)
- 탭: [Collision]
- 설정:
- Inherit Tag : Compound Collision Shape

7. Motor 오브젝트 설정
- 메뉴: Simulate > Bullet > Motor
- 탭: [Object] 설정:
- Object A : Wing
- Object B : Body
※ 연결 순서는 중요하지 않음

8. 회전 설정 및 애니메이션 테스트
- 설정:
- Angular Target Speed : 150
- Torque : 10

- 키보드 F8 키를 눌러 애니메이션 프리뷰 실행
